

Calificación 4.8 de 5. 6 opiniones.
6 calificaciones

en 10 cuotas de sin interés
+100 Seguidores
+100 Productos

MercadoLíder
¡Uno de los mejores del sitio!
+1000
Ventas concretadas
Brinda buena atención

Entrega sus productos a tiempo

ATENCIÓN!!! DESDE EL 1 AL 31 DE ENERO PERMANECEMOS CERRADOS, CON EXEPCIÓN DEL DÍA 14 DE ENERO DONDE HAREMOS LOS ENVÍOS PENDIENTES DE LA PRIMER QUINCENA.
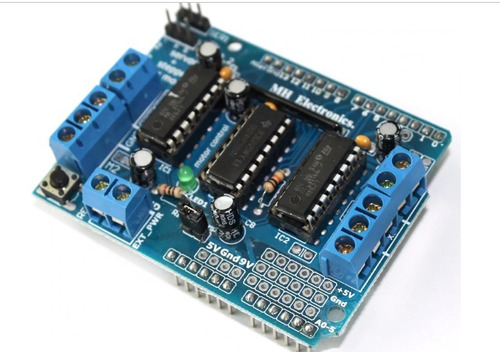
El Shield Motor Driver L293D fue diseñado por Adafruit para facilitar el control de motores con Arduino. El shield facilita el control de hasta 4 motores DC o 2 motores paso a paso unipolares o bipolares y 2 servomotores pequeños (SG90 o MG90). Posee dos drivers puente H L293D manejados por un Chip conversor serial a paralelo 74HC595, reduciendo notablemente el uso de pines de Arduino. El Shield es compatible con Arduino Uno, Mega y Leonardo.
El conversor 74HC595 expande 4 pines (4,7,8,12) de Arduino a 8 pines necesarios para manejar la dirección de los drivers L293D. Las señales "Enable" de los drivers están conectadas directamente a pines PWM de Arduino (3,5,6,11), permitiendo controlar la velocidad de los motores.
El Shield motor L293D soporta:
4 Motores DC bidireccionales (con control de velocidad individual)
ó 2 Motores Paso a Paso (unipolares o bipolares)
2 conexiones para servomotores (SG90 o MG90S)
Voltaje de potencia (motores): 4.5V-24V DC
Corriente DC por canal: 600mA
Corriente pico por canal: 1.2A
Incorpora 2 circuitos integrados L293D proporcionando 4 puentes-H completos
Protección contra sobre carga térmica
Diodos de protección internos contra voltajes inversos generados por las cargas inductivas
4 canales (M1, M2, M3 y M4) para controlar igual número de cargas inductivas como motores DC ó 2 motores paso a paso unipolares o bipolares de entre 4.5 V y 24 V
Permite controlar tanto la velocidad como la dirección de giro de los motores
Control de velocidad de motores DC con resolución de 8 bits (PWM)
Control de motores paso a paso con 1 y 2 bobinas en modo simple, doble (mayor torque) e intercalado (medio paso)
2 conectores independientes para controlar 2 servos pequeños de 5 V (Pines digitales 9 y 10)
Corriente máxima continua en cada una de las salidas M1, M2, M3 y M4: 600 mA (0.6 A)
Corriente máxima pico no repetitivo en cada una de las salidas M1, M2, M3 y M4: 1.2 A
Resistores de pull-down que mantienen los motores deshabilitados durante el encendido
Requiere fuente externa para la alimentación de las cargas en las salidas M1, M2, M3 y M4.
Se puede elegir alimentar el Arduino con la misma fuente de los motores o por separado mediante el Jumper "PWR"
Borneras para alimentación externa (+M, GND)
Conectores para los pines Analógicos
Pulsador de Reset
Led indicador de alimentación de fuente de motores
Dimensiones: 6.8cm x 5.5cm x 2cm
PINES
Arduino 4 - DIR_CLK
Arduino 7 - DIR_EN
Arduino 8 - DIR_SER
Arduino 12 - DIR_LATCH
Arduino 11 - PWM_Motor1
Arduino 3 - PWM_Motor2
Arduino 6 - PWM_Motor3
Arduino 5 - PWM_Motor4
Arduino 9 - Servo_1
Arduino 10 - Servo_2
Entrega gratuita en Santa Lucía y Canelones.
Despacho a cargo del comprador por DAC o Correo del Uruguay.
En general llega en 24 horas a todo el país.
Con el compromiso de calidad y precio de Arduino UY
Opiniones destacadas
2 comentariosCalificación 5 de 5
Si es este el producto que compre, aun no lo he probado.
Calificación 5 de 5
Impecable, pude hacer un autito con esta placa. 10/10.